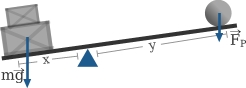
Figura 1. Palanca de primer género.
|
Palanca.
La palanca sirve para disminuir el esfuerzo necesario para realizar un
trabajo mecánico. El brazo de palanca es la distancia desde el punto de
apoyo (llamado también fulcro o punto pivote) hacia la resistencia a vencer y hacia la fuerza aplicada. Del
diagrama de la fig. 1, se puede hacer una sumatoria de torques, si el sistema está en equilibrio:
∑τz = 0
mg x senθ = FP y senθ
mg x = FP y , que es la ley de la palanca de Arquímedes.
La relación mg/FP = y/x es la ventaja mecánica de la palanca.
|
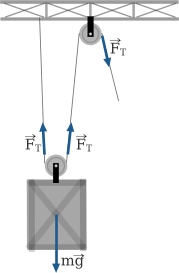
Figura 2. Polea móvil (abajo) y fija (arriba).
|
Polea. Las
poleas son discos con una canaleta por la cual se desliza una cuerda.
En la fig. 2 se muestran dos tipos de poleas: la fija y la móvil. Realizando una
sumatoria de fuerzas en la polea móvil, puede observarse que, para elevar la carga con velocidad constante:
∑Fy = 0
2FT - mg = 0
es decir, la fuerza FT
que se
necesita para elevar la carga es la mitad del peso, por lo que la polea
móvil reduce el esfuerzo a la mitad. En cambio, la polea fija sólo
cambia la dirección de la fuerza aplicada. Por otro lado, al comparar el
trabajo realizado para elevar la carga:
Wnet = 0
FTL – mgh = 0, pues la otra tensión no produce
trabajo, entonces:
(½mg)L = mgh ⇒ L = 2h. Es decir, al usar la polea móvil se hace necesario jalar el doble de cuerda que la distancia subida.
|
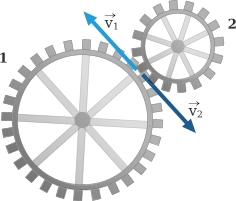
Figura 3. Engranaje.
|
Engranaje.
Los engranajes son ruedas dentadas, como se muestra en la figura 3. Su
principal utilidad es la transmisión de energía. Por ejemplo, los
piñones de las bicicletas o las cajas de
velocidades de los automóviles utilizan engranajes para regular
la velocidad y tracción del vehículo. En la figura pueden compararse
las velocidades tangenciales de los engranajes, en ausencia de
fricción:
v1 = -v2
ω1r1 = -ω2r2
Es decir que para engranajes que giren con velocidad constante, ambos
girarán en sentido contrario, y cuanto menor sea el engranaje, más
rápido girará, pero tendrá menor fuerza de tracción.
|
|
 Schola Mundi tiene una licencia Creative Commons, a menos que se
indique lo contrario.
Schola Mundi tiene una licencia Creative Commons, a menos que se
indique lo contrario.